IMU Schema Example
This example will go through how to connect to the IMU topic published on your EdgeFirst Platform and how to display the information through the Rerun visualizer.
Setting up subscriber
After setting up the Zenoh session, we will create a subscriber to the rt/imu topic
# Create a subscriber for "rt/imu"
subscriber = session.declare_subscriber('rt/imu', imu_listener)
let subscriber = session
.declare_subscriber("rt/imu")
.await
.unwrap();
Decode IMU Data
We can now recieve message on the subcriber. After recieving the message, we will need to deserialize it.
from edgefirst.schemas.sensor_msgs import Imu
msg = subscriber.recv()
imu = Imu.deserialize(msg.payload.to_bytes())
use edgefirst_schemas::sensor_msgs::{IMU};
while let Ok(msg) = subscriber.recv() {
let imu: IMU = cdr::deserialize(&msg.payload().to_bytes())?;
}
Get IMU Values and Post to Rerun
We will now pull out the IMU data from the decoded Imu message and send the quaternion to Rerun.
x = imu.orientation.x
y = imu.orientation.y
z = imu.orientation.z
w = imu.orientation.w
# print("X: %.4f Y: %.4f Z: %.4f W: %.4f" % (x, y, z, w))
rr.log("box", rr.Transform3D(clear=False, quaternion=Quaternion(xyzw=[x,y,z,w])))
let x = imu.orientation.x as f32;
let y = imu.orientation.y as f32;
let z = imu.orientation.z as f32;
let w = imu.orientation.w as f32;
// println!("X: {} Y: {} Z: {} W: {}", x, y, z, w);
let my_quat = rerun::Quaternion([x,y,z,w]);
let _ = rec.log("box", &rerun::Transform3D::default().with_quaternion(my_quat));
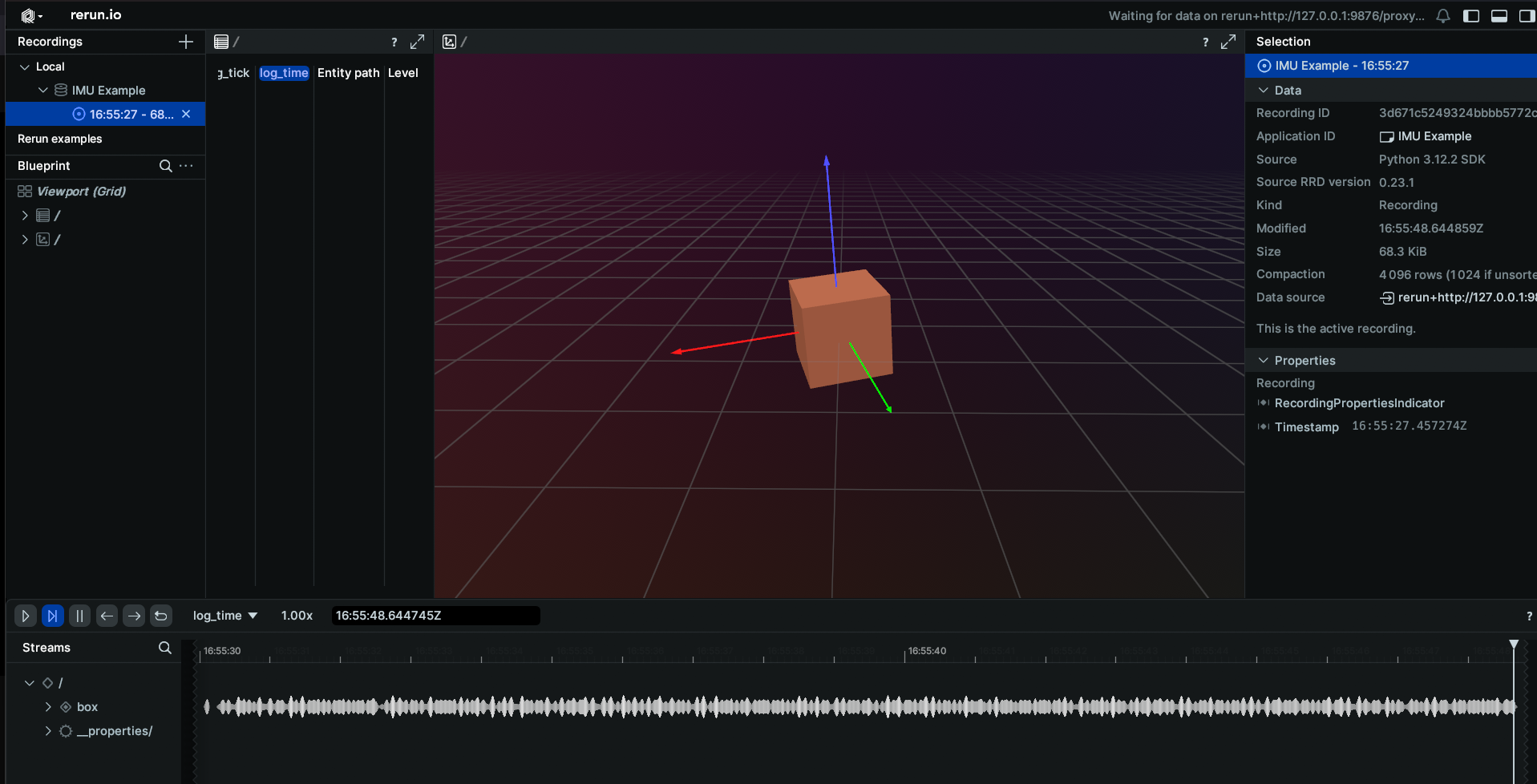
Results
The command line output will appear as the following
X: -0.0125 Y: 0.0383 Z: 0.0698 W: 0.9968
X: -0.0125 Y: 0.0383 Z: 0.0698 W: 0.9968
X: -0.0125 Y: 0.0383 Z: 0.0698 W: 0.9968
When displaying the results through Rerun you will see a solid cube that is matching the orientation of your EdgeFirst Platform