Camera Schema Examples
These examples demonstrate how to connect to various camera topics published on your EdgeFirst Platform and how to display the information through the command line.
Warning
If the Rerun live feed appears to lag, your computer may lack the processing necessary for that stream size, either reduce the stream size or use the --save argument to save it as a .rrd file which you can replay afterwards
Camera Info
Topic: /camera/info
Message: Image
Sample Code: Python / Rust
Setting up subscriber
After setting up the Zenoh session, we will create a subscriber to the camera/info topic
# Create a subscriber for "rt/camera/info"
loop = asyncio.get_running_loop()
drain = MessageDrain(loop)
session.declare_subscriber('rt/camera/info', drain.callback)
// Create a subscriber for "rt/camera/info"
let subscriber = session
.declare_subscriber("rt/camera/info")
.await
.unwrap();
Receive a message
We can now await a message from that subscriber. After receiving the message, we will pass that message along to our processing function in a new thread to avoid missing messages.
async def info_handler(drain):
while True:
msg = await drain.get_latest()
thread = threading.Thread(target=info_worker, args=[msg])
thread.start()
while thread.is_alive():
await asyncio.sleep(0.001)
thread.join()
use edgefirst_schemas::sensor_msgs::CameraInfo;
// Receive a message
let msg = subscriber.recv().unwrap();
let info: CameraInfo = cdr::deserialize(&msg.payload().to_bytes())?;
Process the Data
The CameraInfo message contains camera calibration and configuration information. You can access various fields like:
def info_worker(msg):
info = CameraInfo.deserialize(msg.payload.to_bytes())
width = info.width
height = info.height
rr.log("CameraInfo", rr.TextLog("Camera Width: %d Camera Height: %d" % (width, height)))
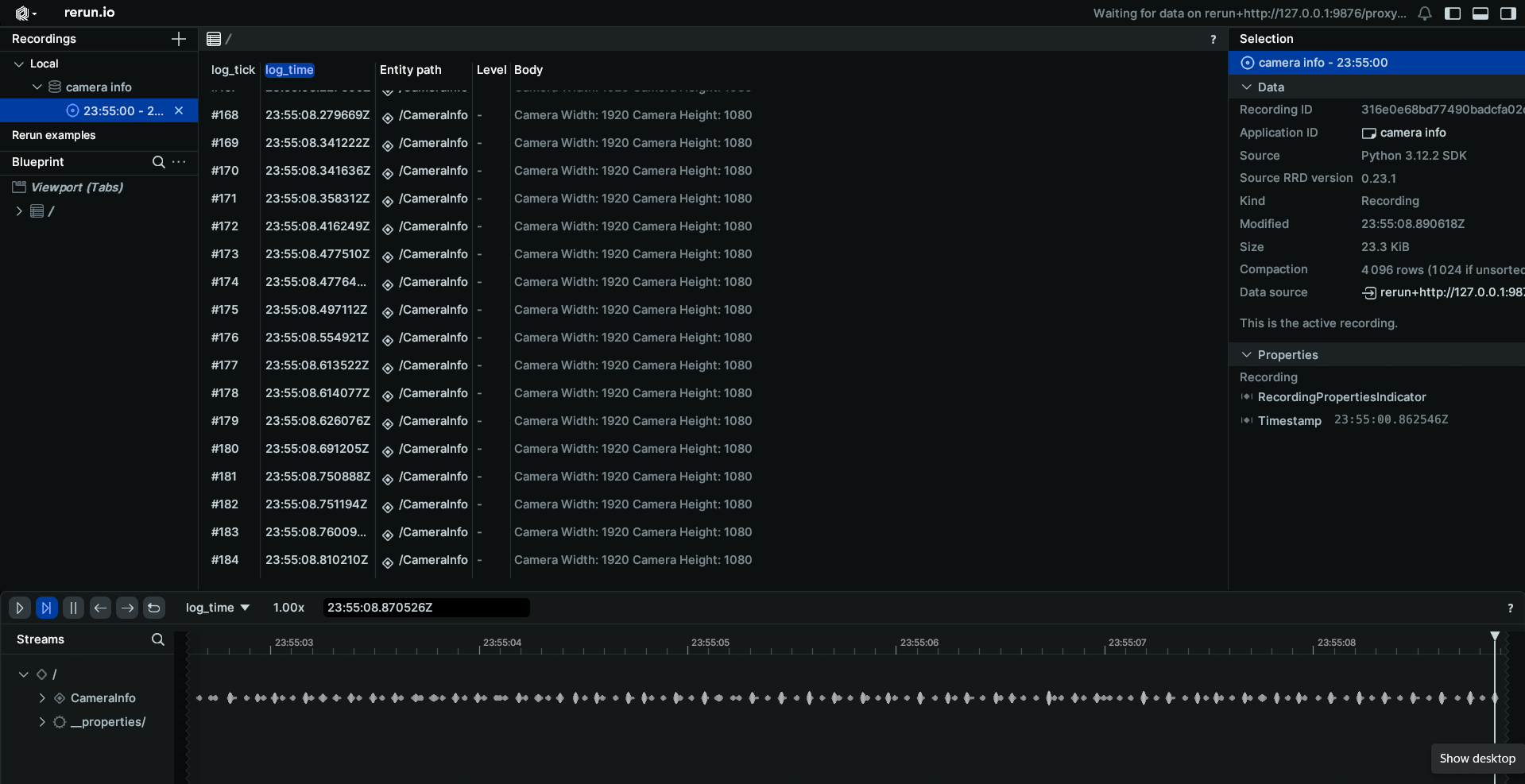
Results
When displaying the results through Rerun you will see a log of the camera width and height.
// Access camera parameters
let width = info.width;
let height = info.height;
let text = "Camera Width: ".to_owned() + &width.to_string() + " Camera Height: " + &height.to_string();
let _ = rr.log("CameraInfo", &rerun::TextLog::new(text));
DMA Buffer
Topic: /camera/dma
Message: DmaBuffer
Sample Code: Python / Rust
Warning
The DMA Buffer example is only functional when run directly on the EdgeFirst Platform as it is references information that is only accessible on the EdgeFirst Platform.
Setting up subscriber
After setting up the Zenoh session, we will create a subscriber to the camera/dma topic
# Create a subscriber for "rt/camera/dma"
loop = asyncio.get_running_loop()
drain = MessageDrain(loop)
session.declare_subscriber('rt/camera/dma', drain.callback)
// Create a subscriber for "rt/camera/dma"
let subscriber = session
.declare_subscriber("rt/camera/dma")
.await
.unwrap();
Receive a message
We can now await a message from that subscriber. After receiving the message, we will pass that message along to our processing function in a new thread to avoid missing messages.
async def dma_handler(drain):
while True:
msg = await drain.get_latest()
thread = threading.Thread(target=dma_worker, args=[msg])
thread.start()
while thread.is_alive():
await asyncio.sleep(0.001)
thread.join()
use edgefirst_schemas::edgefirst_msgs::DmaBuf;
// Receive a message
let msg = subscriber.recv().unwrap();
let dma_buf: DmaBuf = cdr::deserialize(&msg.payload().to_bytes()).unwrap();
Process the Data
The DmaBuffer message contains the process ID of the service that created the DMA buffer and the file descriptor of the DMA buffer, both of which will be necessary to access the image.
def dma_worker(msg):
dma_buf = DmaBuffer.deserialize(msg.payload.to_bytes())
pidfd = pidfd_open(dma_buf.pid)
if pidfd < 0:
return
fd = pidfd_getfd(pidfd, dma_buf.fd, GETFD_FLAGS)
if fd < 0:
return
# Now fd can be used as a file descriptor
mm = mmap.mmap(fd, dma_buf.length)
rr.log("/camera", rr.Image(bytes=mm[:],
width=dma_buf.width,
height=dma_buf.height,
pixel_format=rr.PixelFormat.YUY2))
mm.close()
os.close(fd)
os.close(pidfd)
let pidfd: PidFd = match PidFd::from_pid(dma_buf.pid as i32)
let fd = match get_file_from_pidfd(pidfd.as_raw_fd(), dma_buf.fd, GetFdFlags::empty())
// YUYV has 2 bytes per pixel.
let image_size = (dma_buf.width * dma_buf.height * 2) as usize;
let mmap = unsafe {
from_raw_parts_mut(
mmap(
null_mut(),
image_size,
PROT_READ | PROT_WRITE,
MAP_SHARED,
fd.as_raw_fd(),
0,
) as *mut u8,
image_size,
)
};
let rr_image = rerun::Image::from_pixel_format(
[dma_buf.width, dma_buf.height],
rerun::PixelFormat::YUY2,
mmap.to_vec(),
);
let _ = rec.log("camera/dma", &rr_image);
unsafe {
munmap(mmap.as_mut_ptr() as *mut c_void, image_size);
}
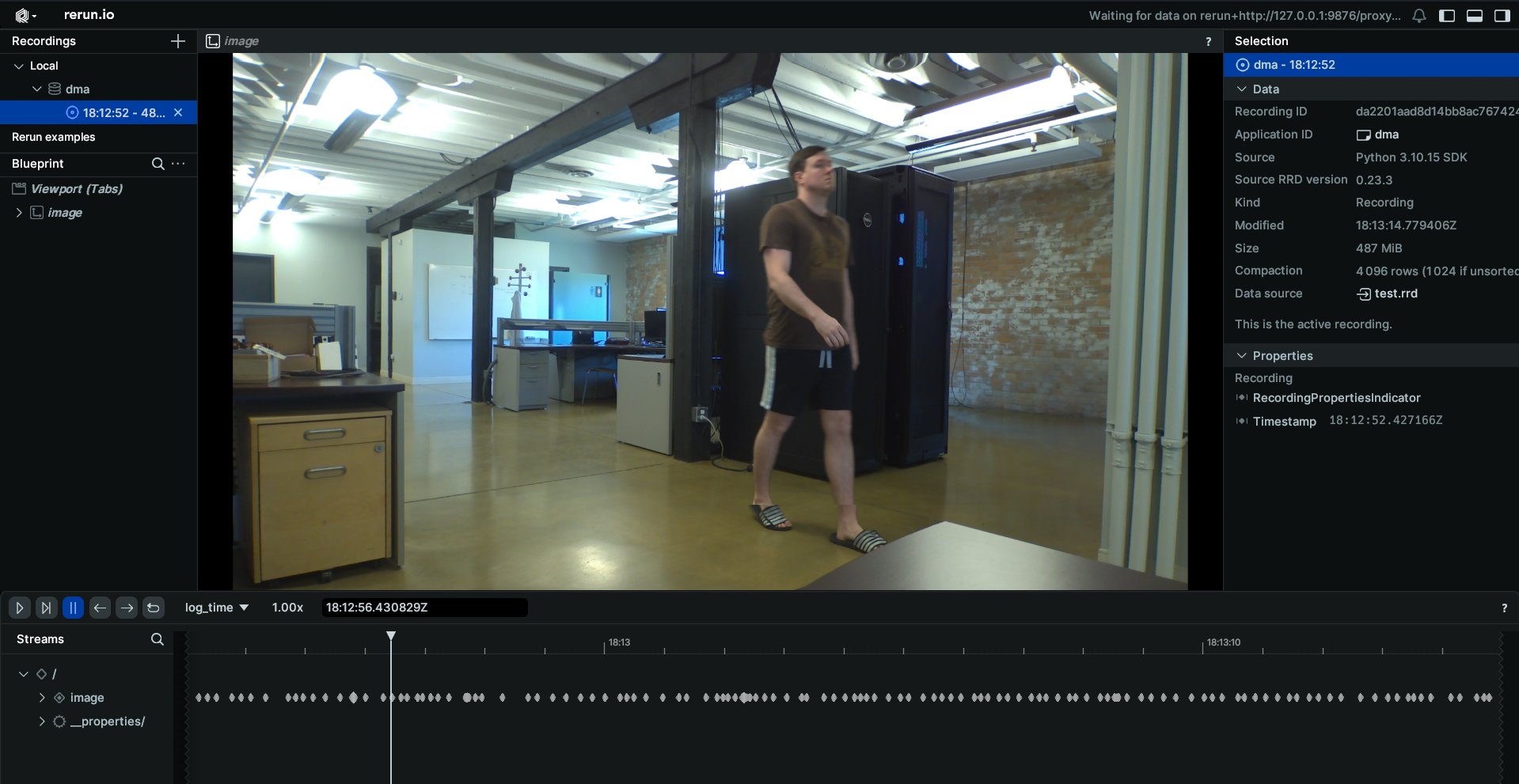
Results
When displaying the results through Rerun you will see the live camera feed from your EdgeFirst Platform.
H264 Camera Feed
Topic: /camera/h264
Message: CompressedVideo
Sample Code: Python / Rust
Setting up subscriber
After setting up the Zenoh session, we will create a subscriber to the camera/h264 topic.
# Create a subscriber for "rt/camera/h264"
loop = asyncio.get_running_loop()
drain = MessageDrain(loop)
session.declare_subscriber('rt/camera/h264', drain.callback)
// Create a subscriber for "rt/camera/h264"
use openh264::decoder::Decoder;
let subscriber = session
.declare_subscriber("rt/camera/h264")
.await
.unwrap();
let mut decoder = Decoder::new()?;
Receive a message
We can now await a message from that subscriber. After receiving the message, we will pass that message along to our processing function in a new thread to avoid missing messages.
async def h264_handler(drain):
raw_data = io.BytesIO()
container = av.open(raw_data, format='h264', mode='r')
while True:
msg = await drain.get_latest()
thread = threading.Thread(target=h264_worker, args=[msg, raw_data, container])
thread.start()
while thread.is_alive():
await asyncio.sleep(0.001)
thread.join()
use edgefirst_schemas::foxglove_msgs::FoxgloveCompressedVideo;
// Receive a message
let msg = subscriber.recv().unwrap();
let video: FoxgloveCompressedVideo = cdr::deserialize(&msg.payload().to_bytes())?;
Process and Log the Data
The CompressedVideo message contains H.264 encoded video data. This data can be logged by the following
def h264_worker(msg, raw_data, container):
raw_data.write(msg.payload.to_bytes())
raw_data.seek(0)
for packet in container.demux():
try:
if packet.size == 0:
continue
raw_data.seek(0)
raw_data.truncate(0)
for frame in packet.decode():
frame_array = frame.to_ndarray(format='rgb24')
rr.log('/camera', rr.Image(frame_array))
except Exception:
continue
use openh264::nal_units;
use openh264::formats::YUVSource;
for packet in nal_units(&video.data) {
let Ok(Some(yuv)) = decoder.decode(packet) else { continue };
let rgb_len = yuv.rgb8_len();
let mut rgb_raw = vec![0; rgb_len];
yuv.write_rgb8(&mut rgb_raw);
let width = yuv.dimensions().0;
let height = yuv.dimensions().1;
let image = Image::from_rgb24(rgb_raw, [width as u32, height as u32]);
rr.log("image", &image)?;
}
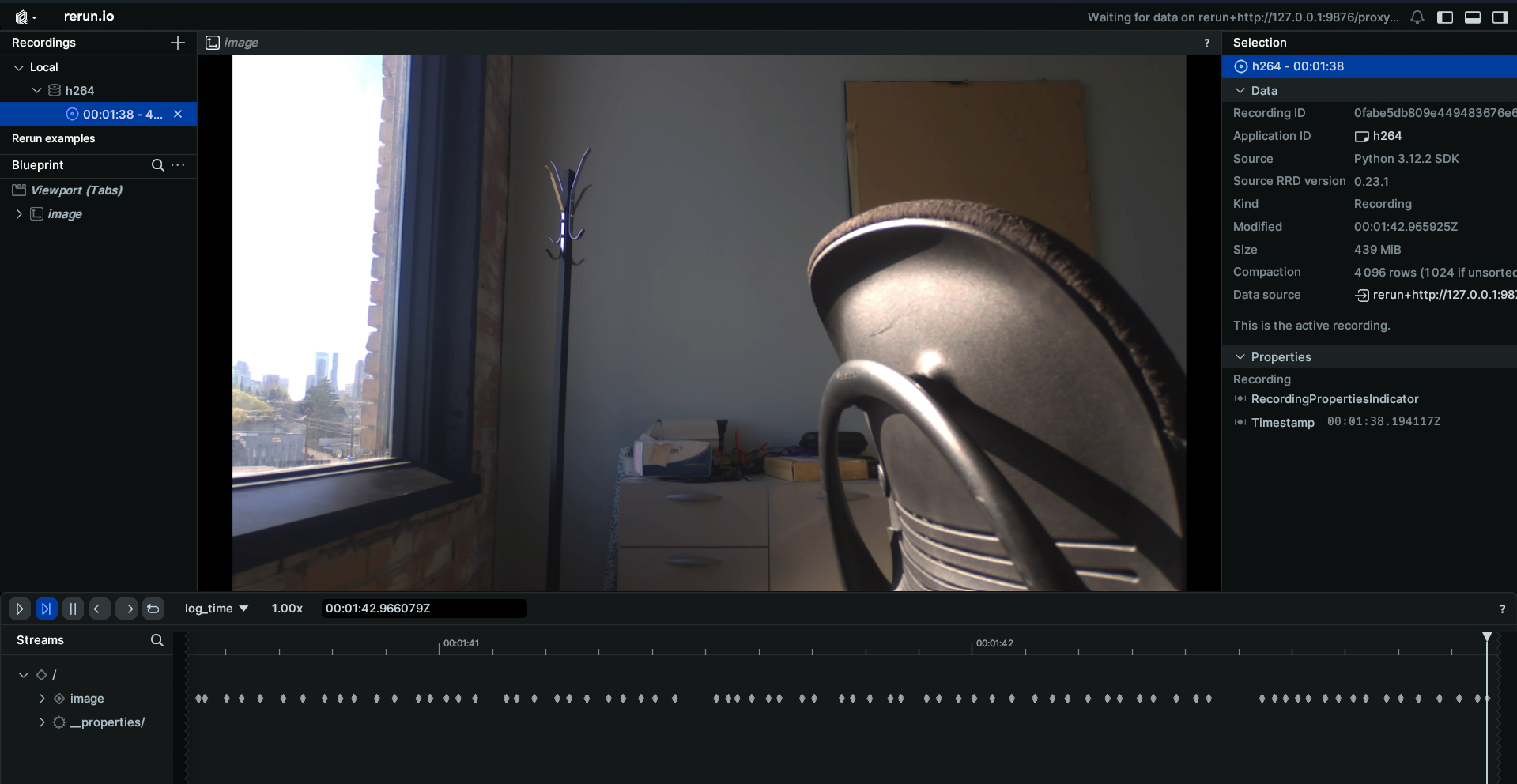
Results
When displaying the results through Rerun you will see the live camera feed from your EdgeFirst Platform.
JPEG Camera Feed
Topic: /camera/jpeg
Message: CompressedImage
Sample Code: Python / Rust
Setting up subscriber
After setting up the Zenoh session, we will create a subscriber to the camera/jpeg topic
# Create a subscriber for "rt/camera/jpeg"
loop = asyncio.get_running_loop()
drain = MessageDrain(loop)
session.declare_subscriber('rt/camera/jpeg', drain.callback)
// Create a subscriber for "rt/camera/jpeg"
let subscriber = session
.declare_subscriber("rt/camera/jpeg")
.await
.unwrap();
Receive a message
We can now await a message from that subscriber. After receiving the message, we will pass that message along to our processing function in a new thread to avoid missing messages.
async def jpeg_handler(drain):
while True:
msg = await drain.get_latest()
thread = threading.Thread(target=jpeg_worker, args=[msg])
thread.start()
while thread.is_alive():
await asyncio.sleep(0.001)
thread.join()
use edgefirst_schemas::sensor_msgs::CompressedImage;
// Receive a message
let msg = subscriber.recv().unwrap();
Process the Data
The CompressedImage message contains JPEG encoded image data. You can process the data with the following
def jpeg_worker(msg):
image = CompressedImage.deserialize(msg.payload.to_bytes())
np_arr = np.frombuffer(bytearray(image.data), np.uint8)
im = cv2.imdecode(np_arr, cv2.IMREAD_COLOR)
im = cv2.cvtColor(im, cv2.COLOR_BGR2RGB)
rr.log('/camera', rr.Image(im))
let im: CompressedImage = cdr::deserialize(&msg.payload().to_bytes())?;
let image = EncodedImage::from_file_contents(im.data);
rr.log("image", &image)?;
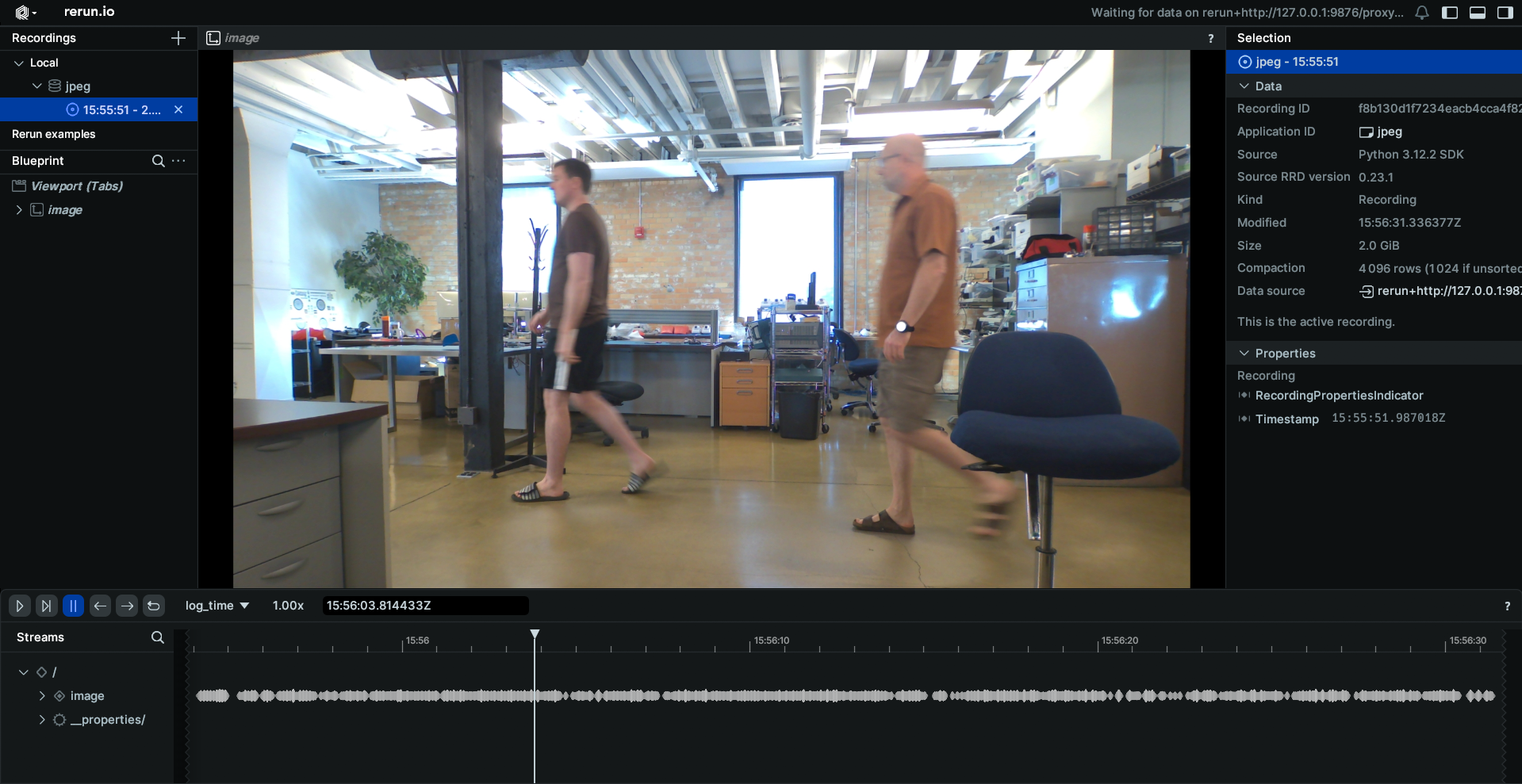
Results
When displaying the results through Rerun you will see the JPEG image feed.