GPS Schema Example
Topic: /gps
Message: NavSatFix
Sample Code: Python / Rust
This example will go through how to connect to the GPS topic published on your EdgeFirst Platform and how to display the information through the Rerun visualizer.
Setting up subscriber
After setting up the Zenoh session, we will create a subscriber to the rt/gps topic
# Create a subscriber for "rt/gps"
loop = asyncio.get_running_loop()
drain = MessageDrain(loop)
session.declare_subscriber('rt/gps', drain.callback)
let subscriber = session
.declare_subscriber("rt/gps")
.await
.unwrap();
Receive the Message
We can now receive a message on the subscriber. After receiving the message, we will set it up for processing.
async def gps_handler(drain):
while True:
msg = await drain.get_latest()
thread = threading.Thread(target=gps_worker, args=[msg])
thread.start()
while thread.is_alive():
await asyncio.sleep(0.001)
thread.join()
use edgefirst_schemas::sensor_msgs::{NavSatFix};
msg = subscriber.recv()
let gps: NavSatFix = cdr::deserialize(&msg.payload().to_bytes())?;
Process the GPS Data
We will now pull out the latitude/longitude data from the decoded NavSatFix message and log the data to Rerun.
def gps_worker(msg):
gps = NavSatFix.deserialize(msg.payload.to_bytes())
rr.log("CurrentLoc",
rr.GeoPoints(lat_lon=[gps.latitude, gps.longitude]))
let lat = gps.latitude;
let long = gps.longitude;
// println!("Latitude: {} Longitude: {}",lat, long);
let _ = rec.log("CurrentLoc", &rerun::GeoPoints::from_lat_lon([(lat, long)]));
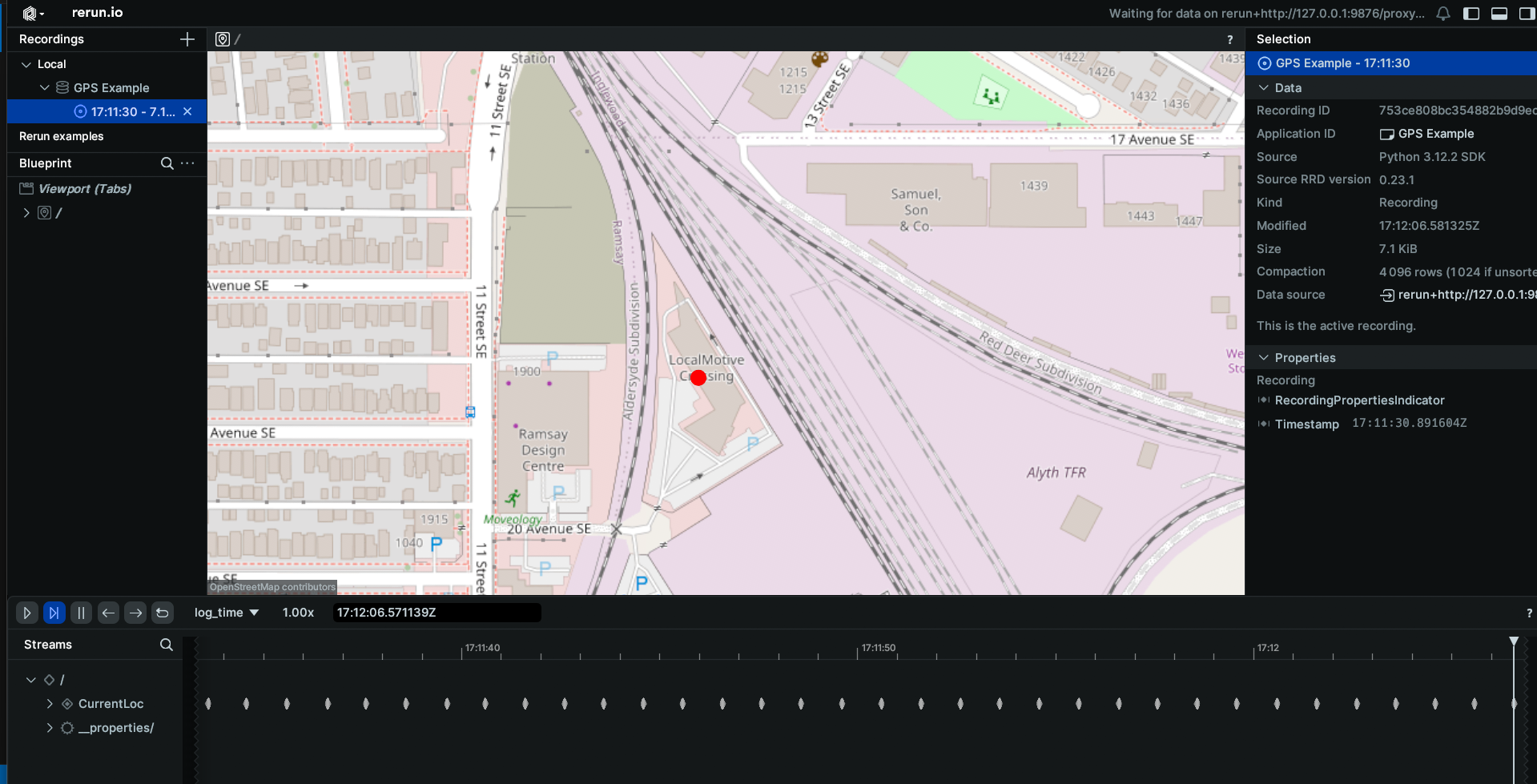
Results
The command line output will appear as the following
Latitude: 51.036506 Longitude: -114.034886
Latitude: 51.036506 Longitude: -114.034886
Latitude: 51.036506 Longitude: -114.034886
When displaying the results through Rerun you will see a map with the location of your EdgeFirst Platform marked.