Supported Platforms
This section covers Quick Start guides for deploying the EdgeFirst workflow in your platform. These guides will start from setting up your platform to running model inference in your platform.



The following diagram describes the workflow you will follow depending on the hardware available.
%%{init: {"flowchart": {"defaultRenderer": "elk", "nodeSpacing": 60, "rankSpacing": 80}, "themeVariables": { "fontSize": "40px" }} }%%
flowchart LR
classDef blue fill:#d0ecff80,font-weight:bold;
classDef teal fill:#a2e8ed80,font-weight:bold;
classDef orange fill:#ffd69980,font-weight:bold;
classDef green fill:#a9e5bb80,font-weight:bold;
classDef purple fill:#d6c1f580,font-weight:bold;
classDef coral fill:#ffc2bb80,font-weight:bold;
classDef all fill:#f0e6f580,font-weight:bold;
classDef invisible fill:transparent,stroke:transparent;
%% ---------- USER GROUP ----------
subgraph Users
direction TB
users_pad[" "]:::invisible
maivin_user([Maivin]):::blue
click maivin_user "quickstart/maivin/" "Open Maivin"
raivin_user([Raivin]):::orange
click raivin_user "quickstart/raivin/" "Open Raivin"
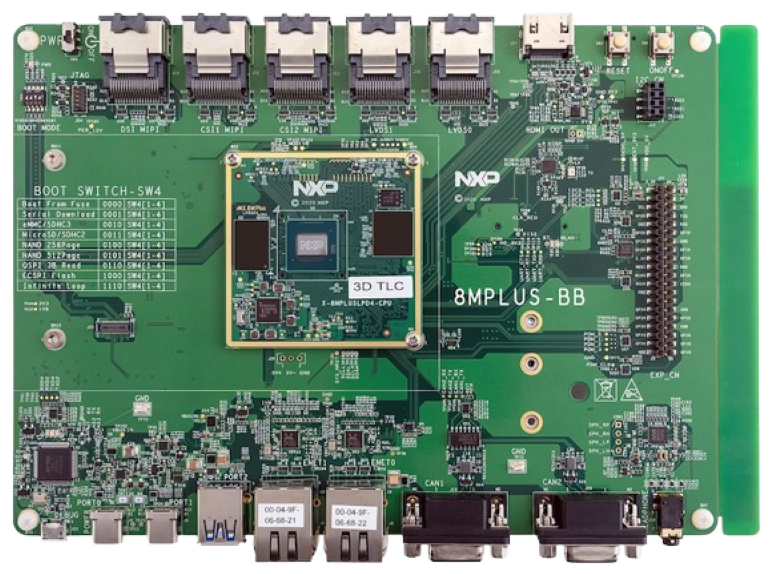
imx8mp_user([i.MX 8M Plus]):::green
click imx8mp_user "quickstart/imx8mplus/" "Open i.MX 8M Plus"
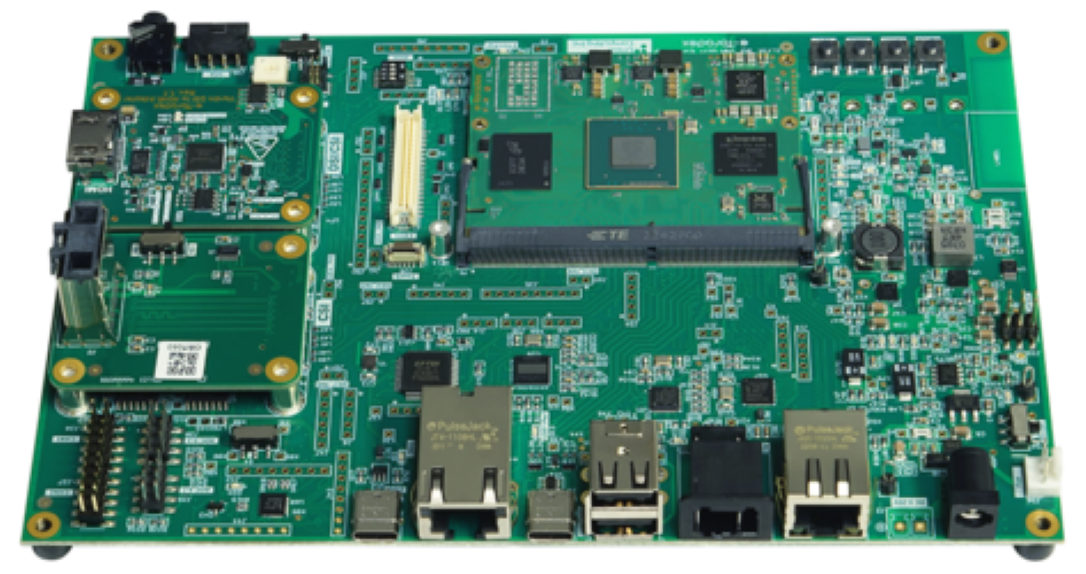
imx95_user([i.MX 95]):::teal
click imx95_user "quickstart/imx95/" "Open i.MX 95"
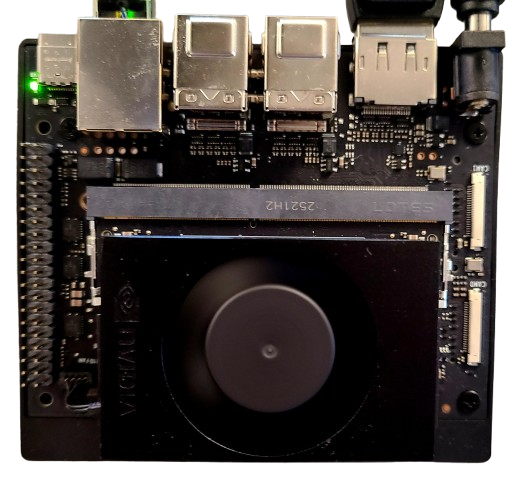
orin_user([Jetson Orin]):::purple
click orin_user "quickstart/jetson_orin/" "Open Jetson Orin"
pi_user([Raspberry Pi 5]):::coral
click pi_user "quickstart/raspberrypi/" "Open Raspberry Pi 5"
end
%% ---------- SETUP ----------
subgraph Device_Setup
direction TB
setup_pad[" "]:::invisible
maivin_setup[Setup Maivin]:::blue
click maivin_setup "quickstart/maivin/setup" "Open Maivin Setup"
raivin_setup[Setup Raivin]:::orange
click raivin_setup "quickstart/raivin/setup" "Open Raivin Setup"
imx8mp_setup[Setup i.MX 8M Plus]:::green
click imx8mp_setup "quickstart/imx8mplus/setup" "Open i.MX 8M Plus Setup"
imx95_setup[Setup i.MX 95]:::teal
click imx95_setup "quickstart/imx95/setup" "Open i.MX 95 Setup"
orin_setup[Setup Jetson Orin]:::purple
click orin_setup "quickstart/jetson_orin/setup" "Open Jetson Orin Setup"
pi_setup[Setup Raspberry Pi 5]:::coral
click pi_setup "quickstart/raspberrypi/setup" "Open Raspberry Pi Setup"
copy_dataset[[Copy Sample Dataset]]
click copy_dataset "../getting_started/copy_dataset" "Copy Public Dataset"
end
%% ---------- TRAINING ----------
subgraph Training
direction TB
training_pad[" "]:::invisible
train_2d[[Train Vision Model]]
click train_2d "../models/training/vision" "Open Training Vision"
ara2{Device has ARA2 processor?}
validate_2d[Validate Vision Model]
click validate_2d "../models/validation/vision/user_managed" "Open Validating Vision"
train_3d[[Train Fusion Model]]:::orange
click train_3d "../models/training/fusion" "Open Training Fusion"
validate_3d[Validate Fusion Model]:::orange
click validate_3d "../models/validation/fusion/managed" "Open Validating Fusion"
end
%% ---------- CONVERSION ----------
subgraph Model_Conversion
direction TB
conversion_pad[" "]:::invisible
neutron_converter[Neutron Converter]:::teal
click neutron_converter "../models/ultralytics/neutron" "Open Neutron Converter"
kinara_converter[Kinara Converter]
validate_imx95[Validate Neutron Converted Model]:::teal
click validate_imx95 "../models/validation/vision/user_managed" "Open Validating Vision"
end
%% ---------- DEPLOYMENT ----------
subgraph Deployment
direction TB
deploy_pad[" "]:::invisible
browser((Browser))
maivin((Maivin)):::blue
click maivin "quickstart/maivin/deploy" "Open Maivin Deploy"
raivin((Raivin)):::orange
click raivin "quickstart/raivin/deploy" "Open Raivin Deploy"
imx8mp((i.MX 8M Plus)):::green
click imx8mp "quickstart/imx8mplus/deploy" "Open i.MX 8M Plus Deploy"
imx95((i.MX 95)):::teal
click imx95 "quickstart/imx95/deploy" "Open i.MX 95 Deploy"
orin((Jetson Orin)):::purple
click orin "quickstart/jetson_orin/deploy" "Open Jetson Orin Deploy"
pi((Raspberry Pi 5)):::coral
click pi "quickstart/raspberrypi/deploy" "Open Raspberry Pi Deploy"
end
%% ---------- USER → SETUP ----------
maivin_user --> maivin_setup
raivin_user --> raivin_setup
imx8mp_user --> imx8mp_setup
imx95_user --> imx95_setup
orin_user --> orin_setup
pi_user --> pi_setup
%% ---------- SETUP → DATA ----------
maivin_setup --> copy_dataset
raivin_setup --> copy_dataset
imx8mp_setup --> copy_dataset
imx95_setup --> copy_dataset
orin_setup --> copy_dataset
pi_setup --> copy_dataset
%% ---------- CONVERSION ----------
train_2d --> neutron_converter --> validate_imx95
ara2 -- Yes --> kinara_converter --> validate_2d
ara2 -- No --> validate_2d
%% ---------- CORE PIPELINE ----------
copy_dataset --> train_2d
train_2d --> ara2
%% ---------- 3D PIPELINE ----------
copy_dataset -- Raivin Only --> train_3d
train_3d --> validate_3d
%% ---------- DEPLOYMENT ----------
validate_2d --> browser
validate_2d --> maivin
validate_2d --> imx8mp
validate_2d --> orin
validate_2d --> pi
validate_2d --> raivin
validate_imx95 --> imx95
validate_3d --> raivin